

Smart Sensor Fusion (SSF) staat voor het combineren van smart sensor data waarbij de resultaten
gecombineerd minder onzekerheid geven dan een individuele dataset. Het reduceren van onzekerheid
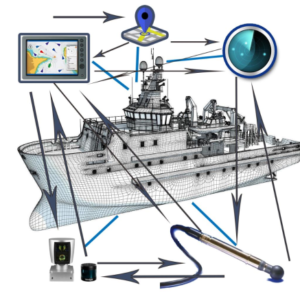
geeft meer accurate, complete en betrouwbaarder resultaten. Maritieme systemen zijn uitgerust o.a. met IS,RADAR,LIDAR,GPS en overige additionele sensoren die individueel data aanleveren. Een variant van
sensor fusion wordt toegepast op (low cost) sensors in vliegtuigen en verkeersmetingen. Deze
techniek wordt niet toegepast op het collectief maar met individuele apparaten. Door Smart Sensor Fusion toe te passen op vaartuigen spreken wij van het verbinden van meerdere sensoren die door
middel van kunstmatige intelligentie samenwerken en data onderling verifiëren.
Toekomstvisie
De tweede stap van Smart Sensor Fusion is het verifiëren van de data zowel van eigen
vaartuig als van de sub-vaartuigen in de omgeving. En het verbinden van meer sensoren op het schip
met de AI. Deze techniek kan bijvoorbeeld toegepast worden op het concept van “Swarming” zowel
voor autonome vaartuigen als bemande vaartuigen.